Projet - Verne’s Games
|
|
|
|
Enjeu : Jules Verne est l’un des écrivains français les plus lus dans le monde. Auteur de romans d'aventures et de science-fiction, il a été une source d’inspiration pour de nombreux scientifiques et ingénieurs et a ainsi contribué à l’évolution de la technologie. |
|

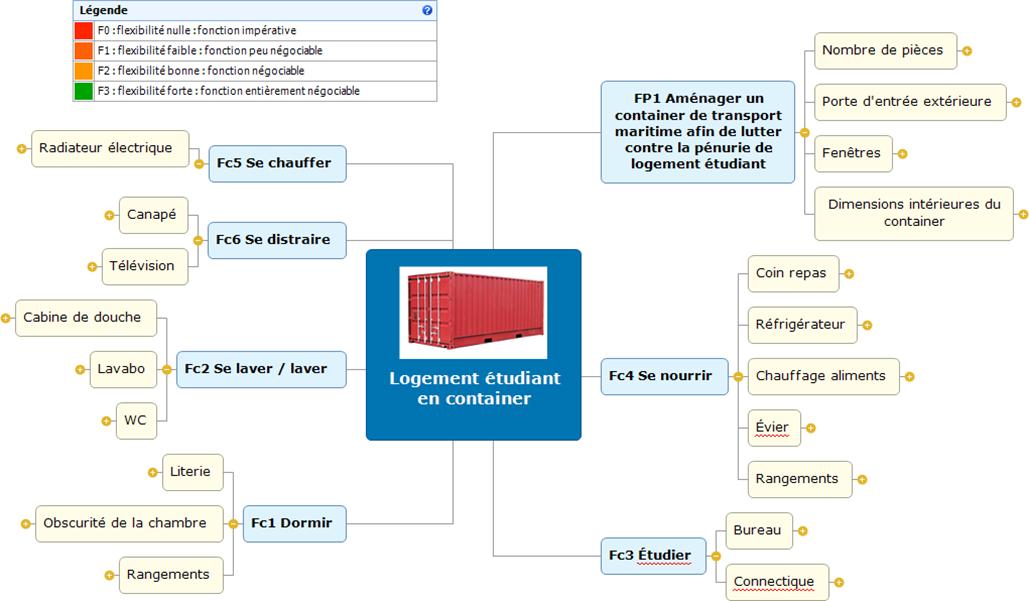
Projet - Logement étudiant en container
|
|
|
|
Enjeu : Les logements universitaires sont trop peu nombreux en France. Le parc public ne compte que 160.000 chambres pour 2,2 millions d'étudiants et il faudrait en construire plusieurs dizaines de milliers pour répondre à la demande.
|
|
 |
|

Compacité des bâtiments
|
|
Comment positionner des containers destinés à loger des étudiants afin de limiter la déperdition thermique ? Pour diminuer les déperditions thermiques d’une construction, il faut limiter les surfaces en contact avec l’extérieur - Murs, toitures, planchers –. |

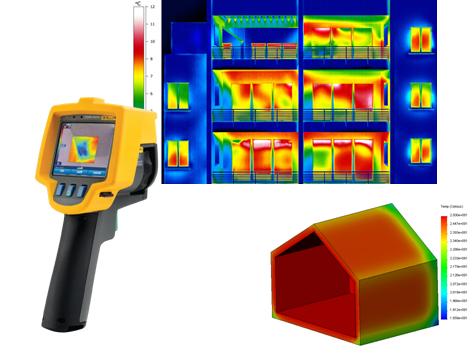
Déperdition thermique
|
|
Comment identifier la déperdition thermique d’un bâtiment et y remédier ? Pour tenter de remédier à la perte de chaleur des maisons pendant l’hiver, on peut réaliser soit un diagnostic en utilisant une caméra thermique soit une simulation à l’aide d’un logiciel permettant de visualiser la déperdition des parois de l'habitation. |
IHM - Anémomètre
|
|
Comment surveiller la rotation d’un anémomètre depuis un ordinateur ? Une Interface Homme Machine ou IHM permet à l’être humain de suivre et d’agir sur un terminal, un écran par exemple, le comportement d’un système automatisé. |